|
| One of Forty Source Images |
Imagine taking a virtual tour of a place such as a beautiful estate or
a historic district. Many methods have been used to represent the
scene and give the tour, such as a set of photographs, a single video
recording, nonlinear video segments, and panoramic images. All of
these techniques record and playback imagery acquired from the actual
scene. However, they constrain the viewer from moving freely and
viewing the scene from any position. Another approach, a walkthrough
of a hand-modeled geometric representation of the environment, allows
free exploration of the scene, but for two reasons lacks realism that
the recording-based methods have. First, every detail in a hand-built
model must be noticed and then modeled by a person - an inherently
limited endeavor; and second, the renderings of the model are subject
to the current state of the art in interactive computer graphics.
One great hope for image-based rendering is that it can combine the
best aspects of these two virtual scene exploration approaches to
yield a compelling, detailed recreation of a scene that can be
explored freely by the viewer. That is, imagine another video tour of
a beautiful place. The video imagery will be as good as a video
recording of the scene (hopefully better), but you can steer the video
anywhere that you are interested in exploring.
Our basic approach is to use images with depth taken from several
places around the environment, process these images to create an
image-based model of the scene, and then render from this model using
appropriate techniques on computer graphics hardware.
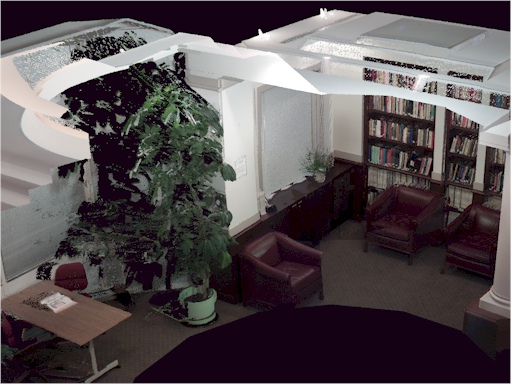 |
| A View Created Using Our Method |
The range data is acquired using a scanning laser rangefinder built by Lars Nyland. Each
scan is approximately 10 million range samples at a resolution of 25
samples per degree and an accuracy of approx. 6 mm. We then take color
images using a high-resolution digital camera (1728x1152 pixels) and
register the color images with the laser scans. We repeat this
acquisition process from several locations in the scene and register these positions. After acquiring these
scans (roughly one gigabyte per room) we must process the data to
prepare it for rendering.
Once we have processed the images to choose which image fragments
to use to represent each surface in the environment we are ready to
render the scene. We use high-end 3D graphics hardware. Normally we
use either PixelFlow, a graphics supercomputer designed here in our
department, or Evans, a 32 processor SGI Origin 2000
RealityMonster. We can render a lower resolution version of the scene
on a PC.
 |
 |
| PixelFlow | Evans (our SGI RealityMonster) |
See my home page: David K. McAllister
See our EGWR99 paper.
Fellowship from

Research Sponsors



Maintained by David K. McAllister
Last Modified 21 Feb 1999