UNC Magnetic Tracker Calibration Research
 |
 |
|
|
Magnetic tracking systems are subject to error in their reports, largely due to distortion of their magnetic fields by other sources of metal or electromagnetic fields in the environment. The heart of our calibration is a mapping of this distortion, from which a correction method can be built. We base our correction method on a 3D look-up table, indexed by position in the magnetic tracker's space. At each point in the table, we store a position and orientation correction. We compute the correction factor by rigidly mounting the magnetic tracker's sensor on a plastic tip of a mechanical tracker (Faro Technologies, Inc. Metrecom IND-01).
We measure the error on a set of irregularly distributed points in space and then resample the correction factors gathered into a regular 3D grid to serve as the look-up table. Gathering this data requires that the two tracking systems agree on a coordinate system--i.e. that there is a calibration between the two tracking systems. We developed a technique for static calibration. This was all we had in our initial attempts to collect data. This implies that the two tracking systems must be stationary long enough for any relative latency between the two to "drift away," making data collection very tedious. Later, we developed latency management techniques that enable us to collect data by simply sweeping the magnetic tracker receiver through space. We can then apply the temporal calibration to the readings to accurately measure the error in the magnetic tracker's readings.
Another result of this work is that position correction alone can improve registration, but in the presence of high orientation error, the effect of position correction (proper perspective) is not noticeable.
| The first shows a close-up of the sensor fixed to the apparatus that enables (limited) freedom of orientation while maintaining a fixed position. |  |
| The second shows a graph of the orientation error versus the azimuth and elevation angles of the sensor. The grid denotes the zero-error floor of the graph; azimuth ranges from -180 (left) to 180 degrees (right); elevation ranges from -90 (front) to 90 degrees (back). Two trials of the experiment are shown, one in white and the other in black. | 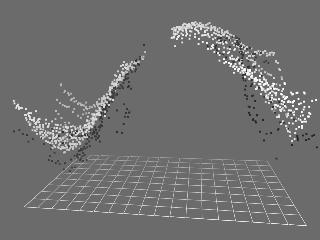 |
| The third picture shows the support structure used to conduct the experiment outside. The black box hanging from the top of the wooden frame is the Extended Range Transmitter. The Faro mechanical tracker is visible in the left-center of the image. | 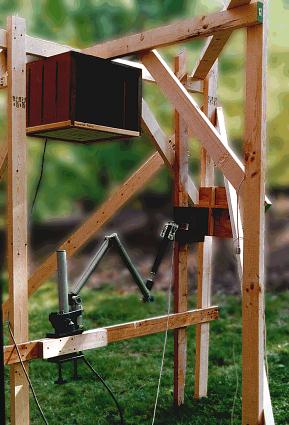 |
Livingston, Mark A. and Andrei State. "Magnetic Tracker Calibration for Improved Augmented Reality Registration." In Presence: Teleoperators and Virtual Environments, MIT Press, Vol. 6, No. 5, October, 1997, pgs. 532--546.
Abstract:
We apply a look-up table technique to calibrate both position and orientation readings from a magnetic tracker for use in virtual environments within a defined working volume. In a test volume of 2.4 cubic meters, the method reduced the average position error by 79% and the average orientation error by 40%. We test the correction table against the tracker's performance outdoors (a metal-poor environment) and show that corrected readings taken in our lab by our method exhibit less error than uncorrected readings taken outdoors. We demonstrate that such reduction in position error visibly improves registration in an augmented reality system, whereas the reduction in orientation error does not visibly improve registration. We show that the model we used for the orientation error function was incorrect, preventing our method from achieving better correction of orientation error. We discuss future directions for correction of orientation error.
This work is part of the UNC Ultrasound Visualization project.