UNC Laparoscopic Visualization Research
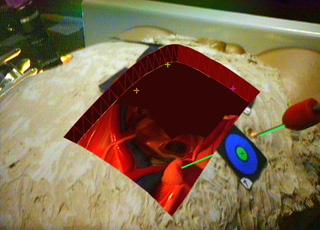
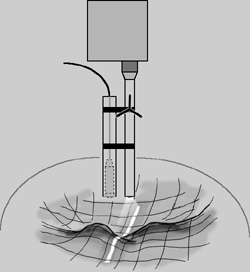
Note that we have changed from the magnetic tracking system to a FlashPoint 5000, a commercial optical tracking system from Image Guided Technologies for our primary head tracking system. The only new component of the system is our prototype 3D laparoscope to extract depth and color (texture). This system combines a conventional laparoscope, a miniature video camera, and a projector to be able to extract range images of the interior patient anatomy. The depth extraction is done by sweeping a plane of light across the projector's image plane, a simple form of structured light common in computer vision algorithms. This processing is done on an O2 from Silicon Graphics Inc. and the data is sent via Ethernet to our main host (still the SGI Onyx2 used in the ultrasound visualization system). We are currently working on new designs for the device in order to decrease the size and increase the manueverability. We track the device with the FlashPoint 5000, and can track instruments with our Metrecom IND-01 arm from FARO Technologies, Inc. A rough schematic of the device is pictured below.
Mail Andrei State for more info