Computational Photography, Fall 2014
|
Assignment 3:Stereo Pinhole Camera
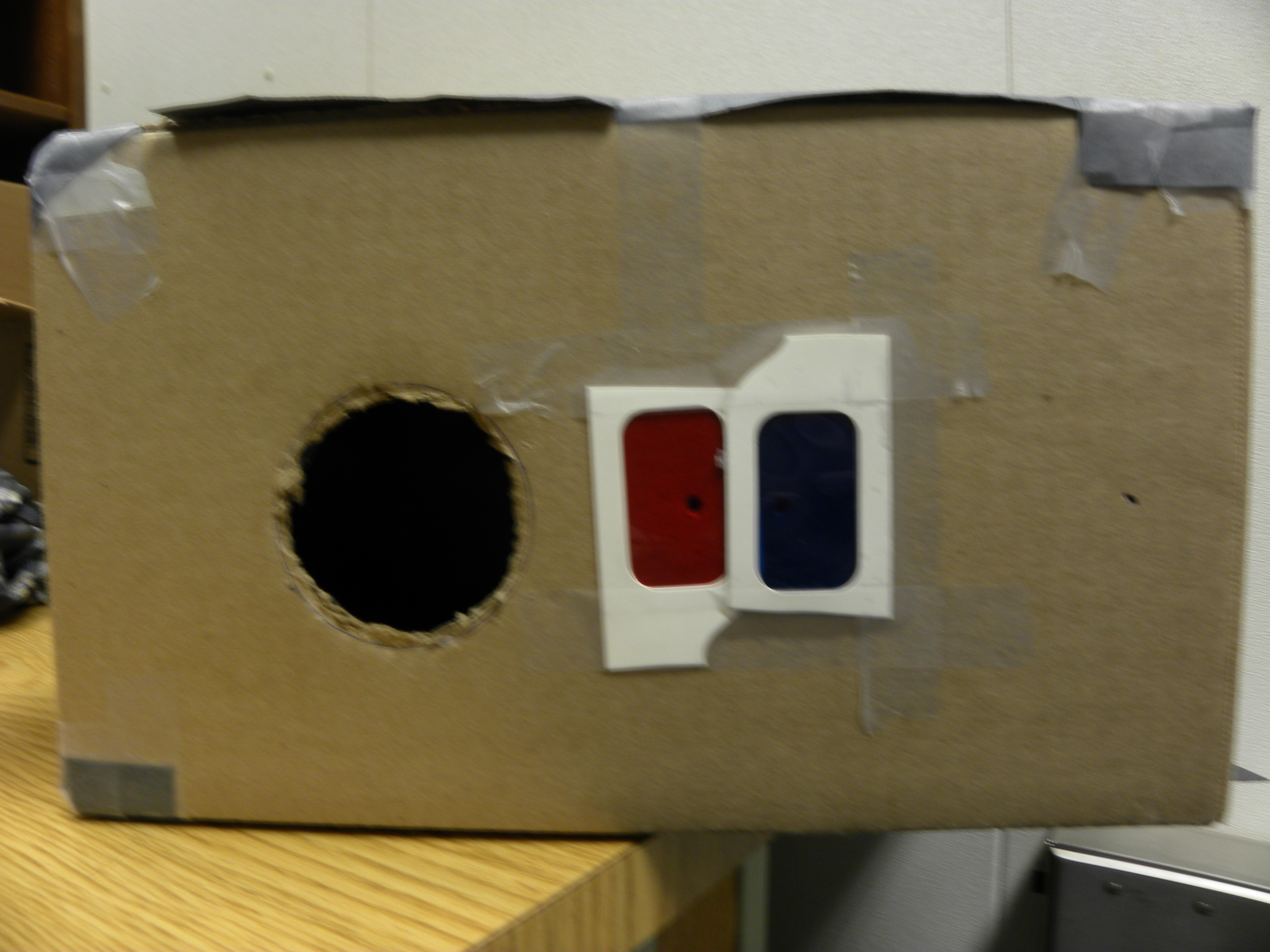
The objective was to construct a stereo pinhole camera using the material provided (filters, black paper,etc Thanks Prof. Berg!) and a shoebox. With the help of the pinhole anaglyph images, 3D depth estimation was done. The second part consisted of creating antipinhole images and possibly using HDR imaging to improve the SNR. Credit to my group members: Yi Ren(guy with Nikon P90), Danwei Li,Kecheng Yang. 1.2 Creating the stereo pinhole camera The shoebox was covered with black paper from inside and one side of the box was glued a white paper which functioned as a screen. All the holes, corners,etc form where light could leak inside were covered with abundant use of tape and black paper.
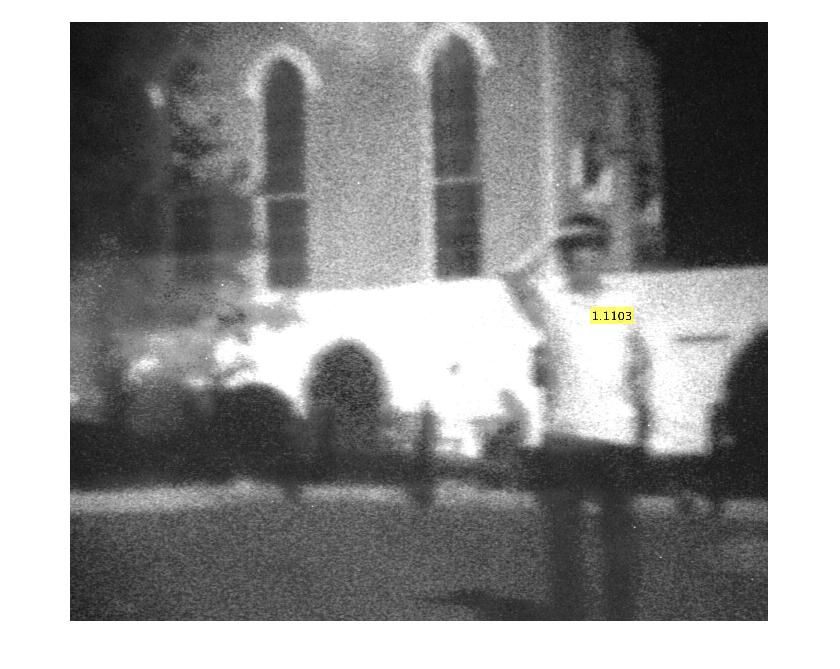
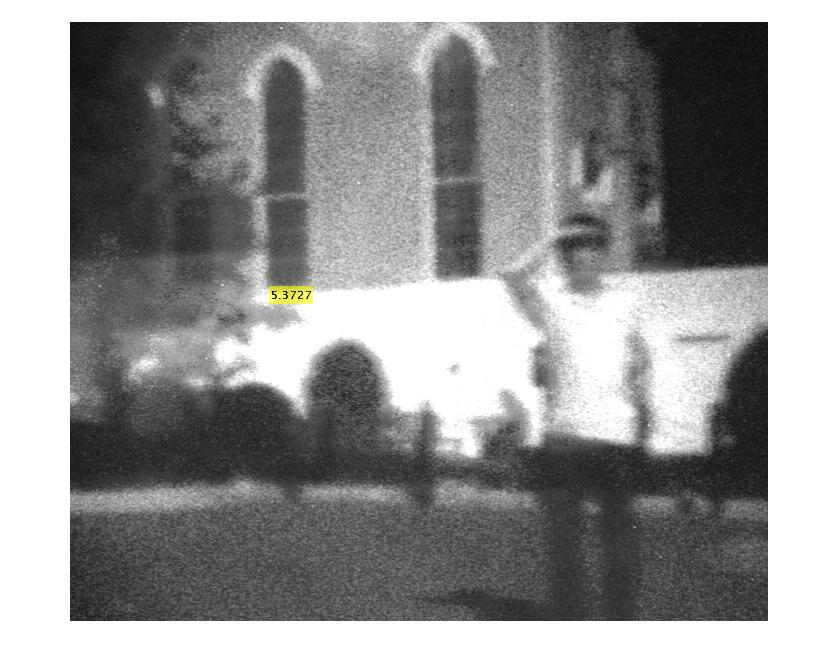
1.3 Stereo pinhole cameraThe images taken were of very low quality as the maximum exposure available was 8secs hence the pinhole camera doesnt collect much light. Fig 2 is a cropped, flipped upside down and multiplied by 10 version of the original captured image. The rest of the following images are the separate channel images.
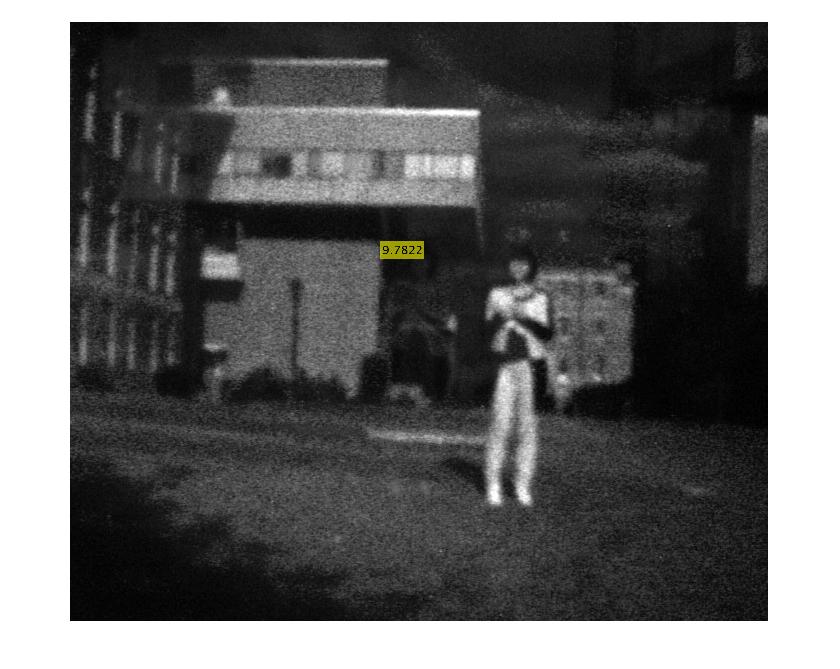
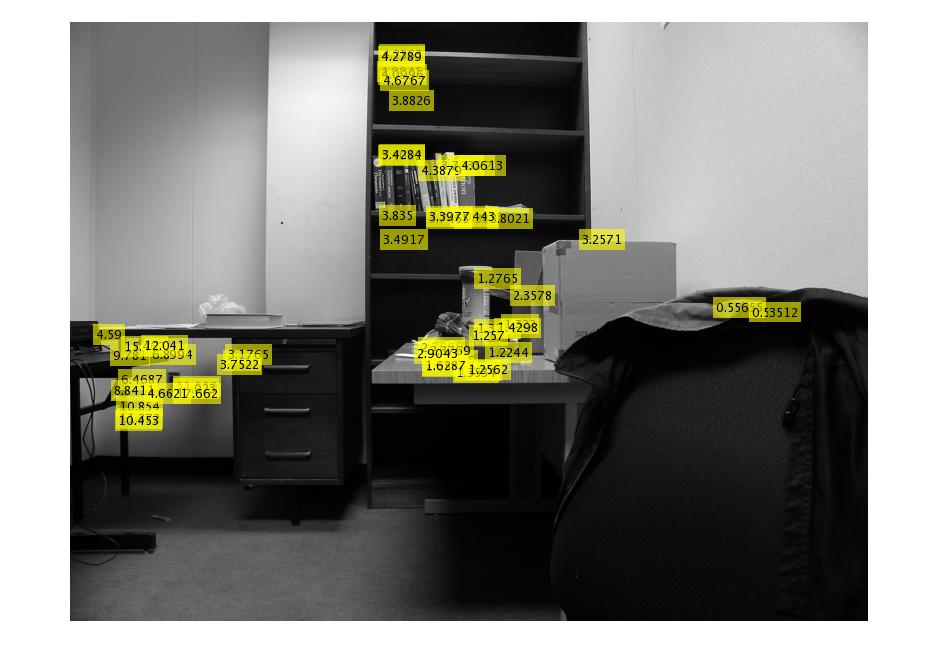
1.3.1 Manual estimation of depth using pinhole images :The manual estimation was done using the anaglyph images. The iminfo command in MATLAB gave the focal length. In this you can specify two points interactively (ginput) and the program gives an estimation of depth at that point. Click on the image to see the estimated depths. The baseline can be estimated by taking a photo of a ruler and then doing the real-world to pixel co-ordinates conversion.
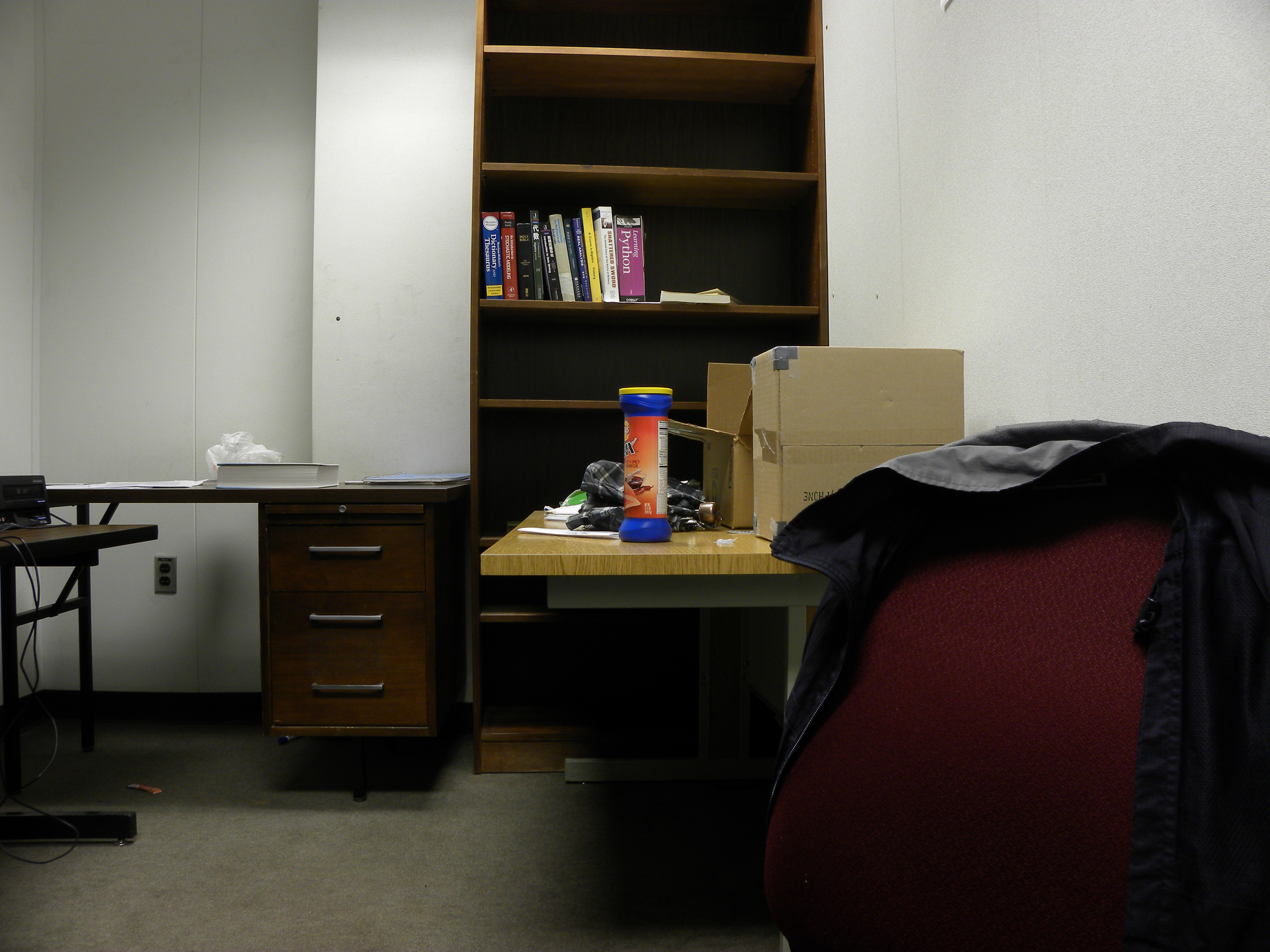
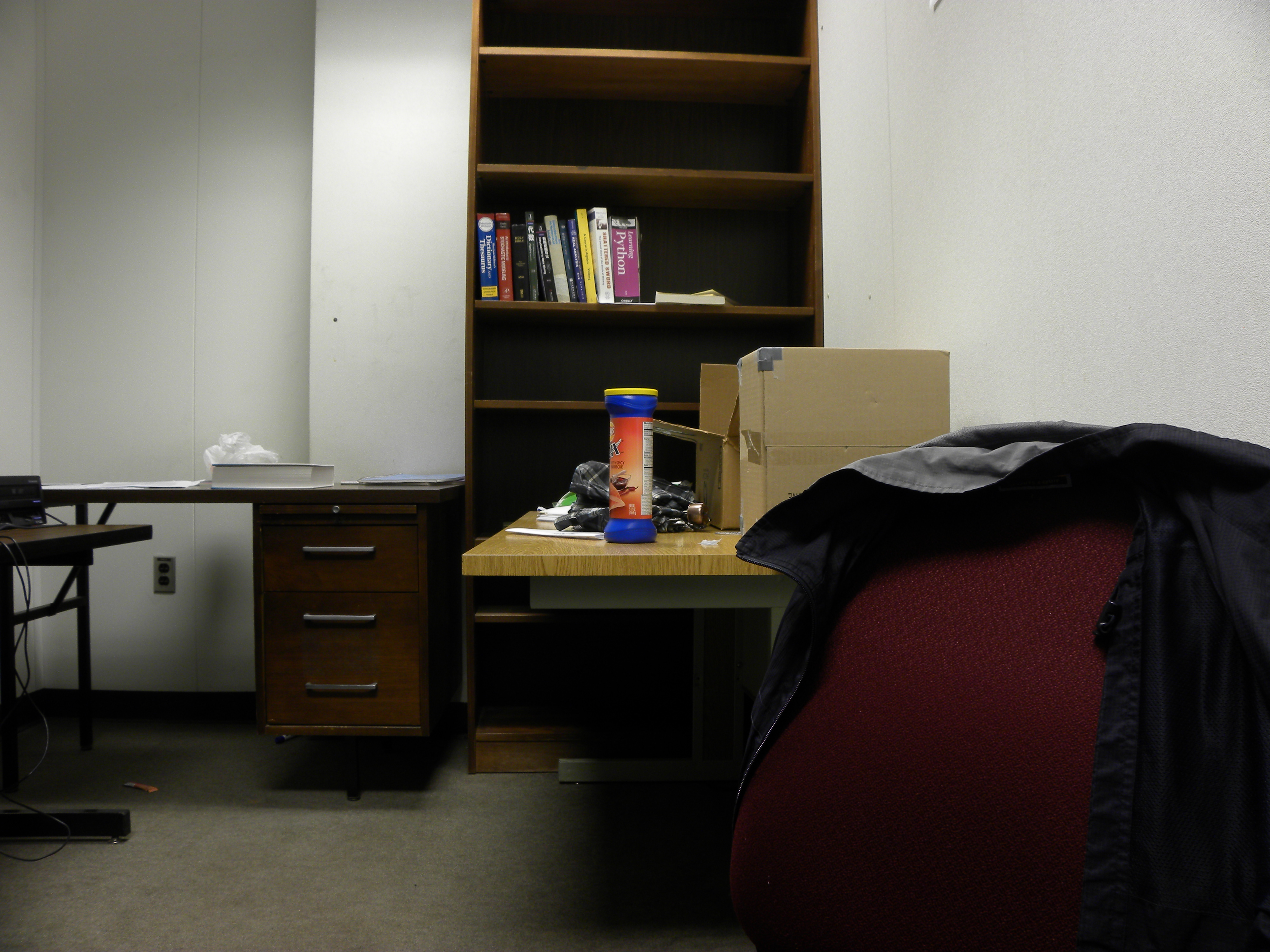
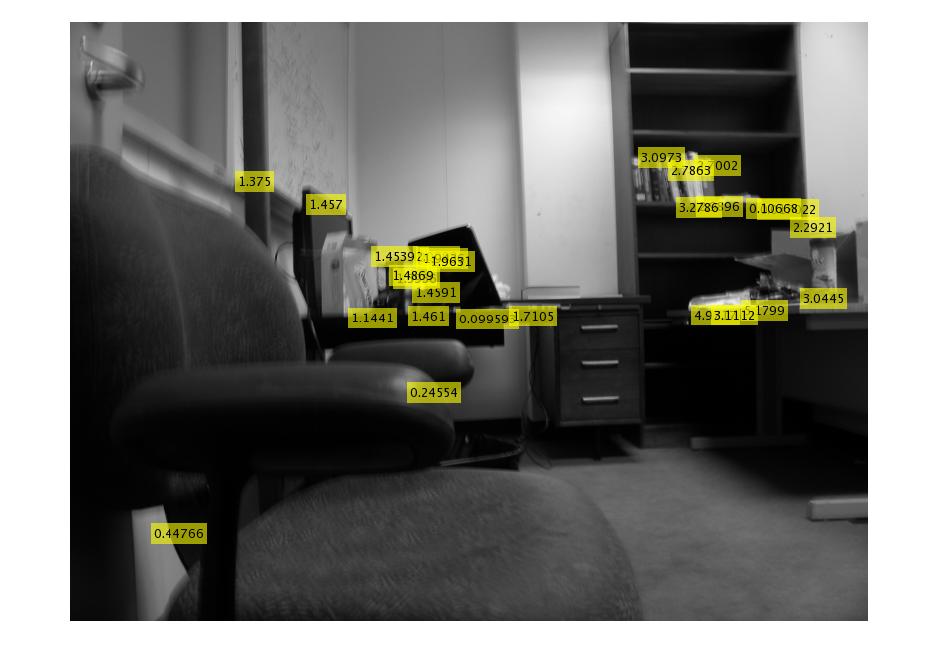
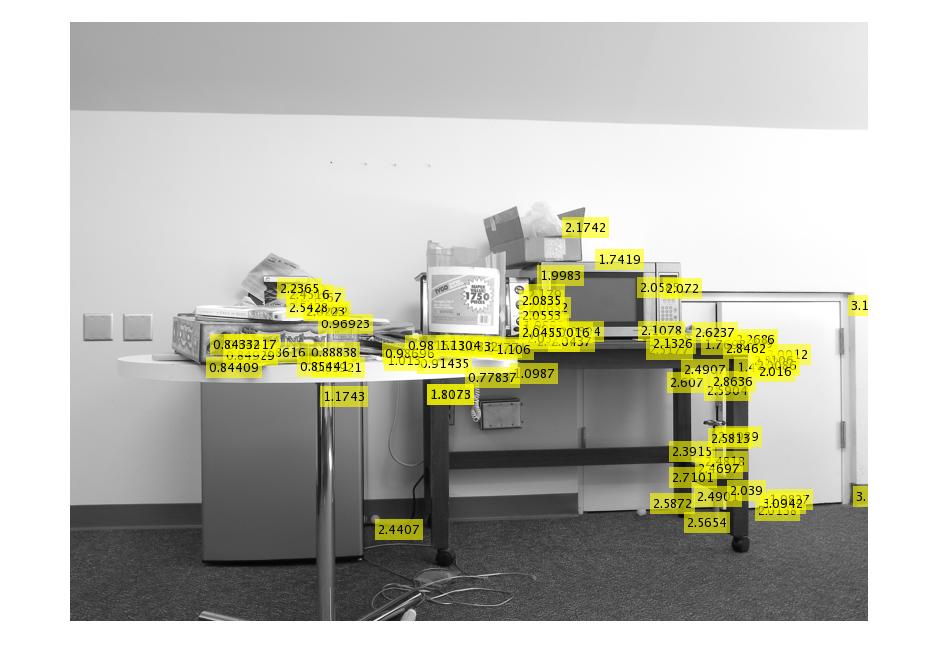
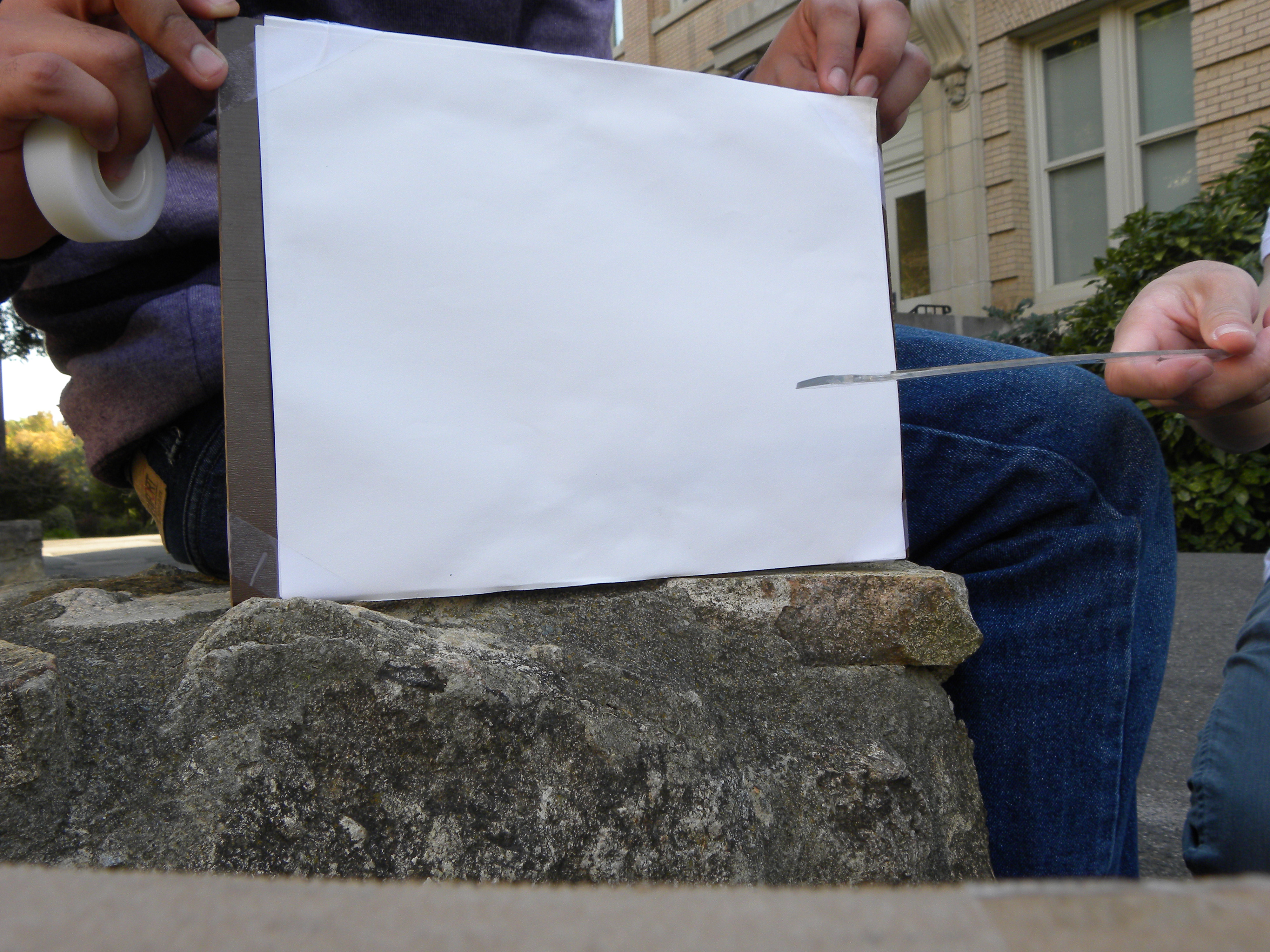
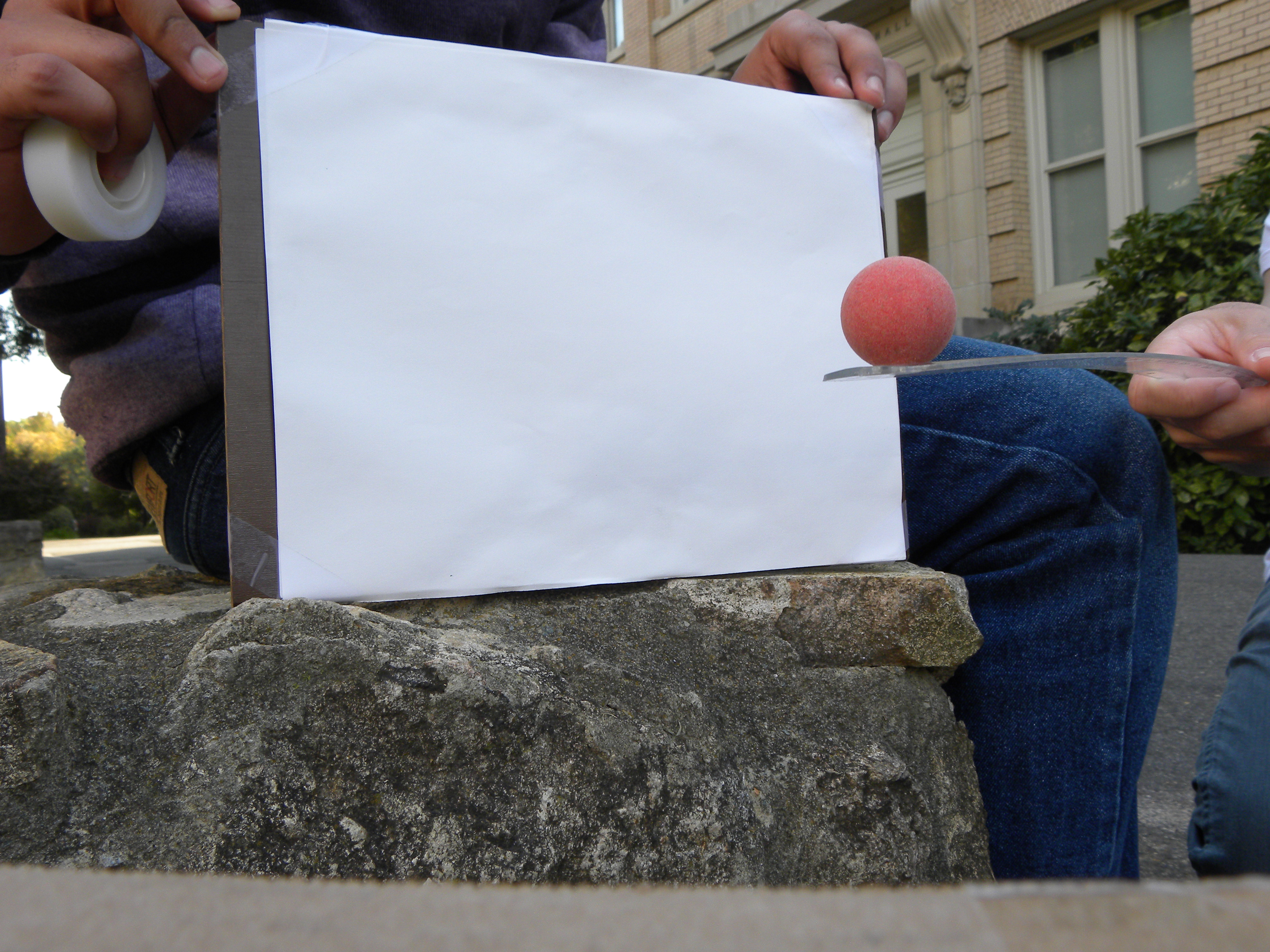
1.3.2 Automatic estimation of depth using stereo pairsThe pinhole images are very noisy to get good correspondences. Hence automatic depth estimation was done on stereo images that we captured. The Pair of images were assumed to be in the same plane and no rectification was used. This algorithm used the SURF features to get the correspondences. 1.4 Anti-pinhole imagesThe process of taking anti-pinhole images was the toughest. We took a white paper and taped it to a board. This functioned as our screen. With this, we used a table tennis ball as an occluder. The difference image was multiplied by a scaling factor which was adjusted on a case to case basis. 1.5 Matlab FilesDownload the zip file Code:zipped files |