Sean Curtis
Digital Jack-of-all-Trades
INTERESTS
Over the years I've had the opportunity to dabble in many different fields. There are many other fields in which I look forward to playing in the years to come. Because of my experience as a modeler and animator, I tend to gravitate towards those disciplines that contribute to the story-telling process. There is an exception to this: hardware. I have an absolute fascination with hardware design and have had the opportunity to study architecture under Dr. Fred Brooks--a once in a lifetime opportunity.
My dissertation is primarily focused on models for efficient and accurate pedestrian synthesis based on multi-agent navigation techniques. But during my time at UNC I've also been able to perform research and collaborate on: collision detection, ray tracing, numerical methods and non-photorealistic rendering. Links to my papers and research demonstrations are listed in each relevant section.
Pedestrian Modeling and Multi-Agent Navigation
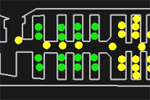
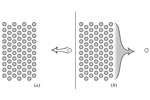
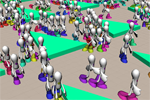
Pedestrian modeling, sometimes referred to as crowd simulation, has much in common with multi-agent navigation problems. Multi-agent navigation is the discipline in which multiple agents move through a shared space. It has applications in robotics, virtual reality, animation and entertainment. At every moment in time, each agent computes a velocity which will bring the agent to its eventual goal without collision.
A crowd of pedestrians is a crowd of agents. Each pedestrian tries to achieve a particular goal while avoiding contact with other people. Applying these techniques to simulating humans introduces complexities above and beyond those encountered in systems of abstract agents or simple robots. Humans exhibit behaviors which are based on psychological and cultural values and they are constrained by the physiological realities of locomotion. Finally, in robotics, motion planning can be considered successful if the robot reaches its goal with some acceptable cost. In simulating pedestrians, that is insufficient. The virtual humans must exhibit the same behaviors as real humans would. Even understanding what behaviors are realistic and how to measure or detect them is still an open problem.
I've had the opportunity to investigate many of these questions. Applying state-of-the-art crowd analysis techniques and data of real pedestrians, I've developed algorithms to better model pedestrians in intersting scenarios. Furthermore, I've developed motion-planning algorithms which enable agents to navigate a shared space more efficiently. Finally, I've had the opportunity to collaborate with many of my peers in modeling crowds.

Sean Curtis
PDF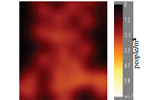
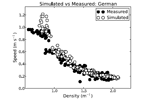
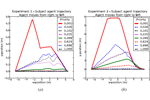
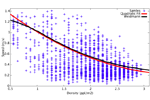
Generating Pedestrian Trajectories Consistent with the Fundamental Diagram based on Physiological and Psychologcal Factors
PLoS ONE 10(4): e0117856. doi:10.1371/journal.pone.0117856, 2015

DenseSense: Interactive Crowd Simulation using Density-Dependent Filters
Eurographics/ACM Siggraph Symposium on Computer Animation (SCA), Vol. 108, pp. 81-86, 2014
Ped-Air: a Simulator for Loading, Unloading, and Evacuating Aircraft
In Proceedings of PED2014, 2014

Hybrid Long-Range Collision Avoidance for Crowd Simulation
IEEE Transactions on Visualization and Computer Graphics, July 2014, pp. 1022-1034, 2014
Pedestrian Simulation using Geometric Reasoning in Velocity Space
In Proceedings of PED2012, 2012
Virtual Tawaf: A Velocity-space-based Solution for Simulating Heterogeneous Behavior in Dense Crowds
(To be published) Modeling, Simulation and Visual Analysis of Large Crowds, Springer-Verlag, 2012
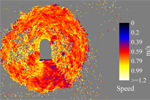
Virtual Tawaf: A Case Study in Simulating the Behavior of Dense, Heterogeneous Crowds
1st IEEE Workshop on Modeling, Simulation and Visual Analysis of Large Crowds, 2011
Walk this way: A lightweight, data-driven walking synthesis algorithm
Motion in Games, vol. 7060 of Lecture Notes in Computer Science, pp. 400-411, 2011

Way portals: Efficient multi-agent navigation with line-segment goals
In ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games (I3D), 2012

Composite Agents
In Proceedings of the 2008 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, pp. 39-47, 2008
Towards a digital makkah - using immersive 3d environments to train and prepare pilgrims
In International Conference on Digital Media and its Applications in Cultural Heritage (DMACH), 2011

Directing crowd simulations using navigation fields
IEEE Transactions on Visualization and Computer Graphics (TVCG), vol. 17, pp. 244-254, 2010

PLEdestrians: A Least-Effort Approach to Crowd Simulation
In Proc. SCA 2010, pp. 119-128, 2010

Independent navigation of multiple robots and virtual agents
In International Conference on Autonomous Agents and Multiagent Systems (AAMAS), pp. 1645-1646, 2010

Aggregate Dynamics for Dense Crowd Simulation
In ACM Transactions on Graphics (Proceedings of SIGGRAPH Asia), vol. 28, no. 5, pp. 122:1122:8, 2009.

Interactive modeling, simulation and control of large-scale crowds and traffic
In Proceedings of the 2nd International Workshop on Motion in Games, MIG '09, pp. 94-103, 2009.

Real-time path planning in dynamic virtual environments using multiagent navigation graphs
IEEE Transactions on Visualization and Computer Graphics (TVCG), 2008

Real-time Path Planning for Virtual Agents in Dynamic Environments
IEEE Virtual Reality (VR), 2007
Collision Detection
For my Master's degree, I performed research in collision detection. While working as in intern at Walt Disney Animation Studios, I developed geometric technqiues to accelerate the continuous collision detection used in the cloth simulation system.

Fast Collision Detection for Deformable Models Using Representative-Triangles
ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games (I3D), 2008

ICCD: Interactive Continuous Collision Detection Between Deformable Models Using Connectivity-based Culling
IEEE Transactions on Visualization and Computer Graphics (TVCG), 2009
Interactive Continuous Collision Detection Between Deformable Models Using Connectivity-based Culling
ACM Symposium on Solid and Physical Modeling (SPM), 2008
PAST RESEARCH
Ray tracing
I had the opportunity to work with Christian Lauterbach in fall of 2006. Along with Sung-Eui Yoon, we worked on ray tracing large and complex scenes. Particularly, Sung-Eui and I focused on adpating spatial acceleration structures in dynamic scenes.

Ray Tracing Dynamic Scenes Using Selective Restructuring
Eurographics Symposium on Rendering (EGSR), 2007
Numerical Methods
My final year as an undergrad I worked with Mike Kirby at SCI (in collaboration with
Jennifer Ryan at Virgina Tech) on a numerical post-processor.
The product of finite-element methods (FEM) is a set of piecewise continuous functions, defined over the domain of simulation. The order
of the function on each cell is dependent on the details of the specific FEM techniques used, but at the cell boundaries
there are usually not even guarantees of C0 continuity.
Our post-processor filters the FEM results by convolving it with a kernel formed from a linear combination of b-splines. The
filtered data guarantees continuity at the boundaries and produces a higher order of accuracy.
Many numerical calculations (such as high-order integration) rely on continuity assumptions. When performing integration,
such as creating streamlines, these high-order integrators fail to converge as they should because of the broken
continuity assumption. Our filter restores the assumption and allows full convergence. Papers related to this work can
be seen here and here.
Investigation of Smoothness-Increasing Accuracy-Conserving Filters for Improving Streamline Integration Through Discontinuous Fields
IEEE Transactions on Visualization and Computer Graphics, vol. 14, no. 3, pp. 680-692, 2008
Post-processing for the Discontinuous Galerkin Method Over Non-Uniform Meshes
SIAM Journal of Scientific Computing, Vol. 30, Number 1, pp. 272-289, 2007
Non-photorealistic Rendering
| In my second year at the University of Utah, I worked with Pete Shirley on developing a real-time non-photorealistic renderer for terrain. The result of my efforts can be seen here. This work went on to form the basis of my undergraduate thesis. |
|

