Dr. Liangjun Zhang's R&D experience spans autonomous driving, LLM+Robotics and construction robotics.
My innovative contributions encompass areas such as LLM, NeRF, 3D object detection, SLAM, IL/RL, motion planning, geometric computing,
control, and system integration.
The following is a list of selected projects. You can check full list of publications using:
Google Scholar
LLM + Robotics
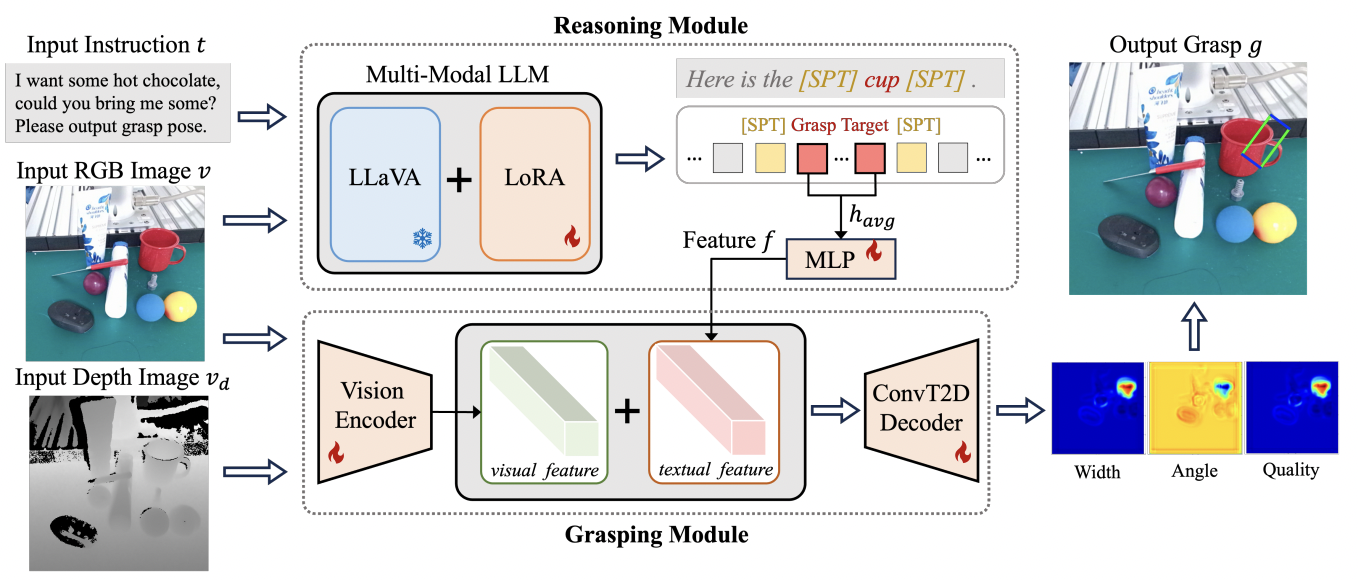
Reasoning Grasping via Multimodal Large Language Model
Shiyu Jin, Jinxuan Xu, Yutian Lei, Liangjun Zhang
Under review, 2024
Paper
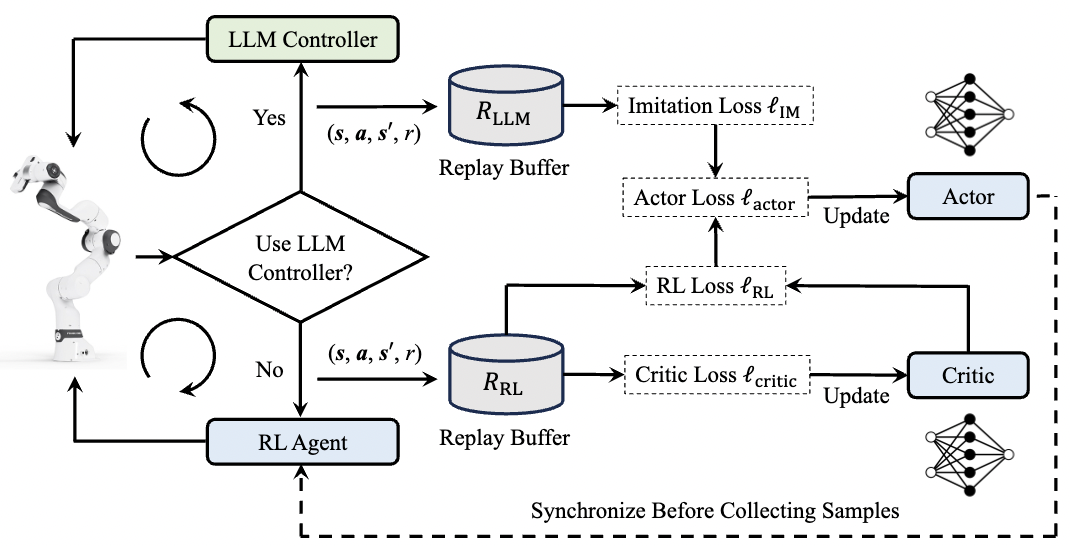 RLingua: Improving Reinforcement Learning Sample Efficiency in Robotic
Manipulations with Large Language Models
RLingua: Improving Reinforcement Learning Sample Efficiency in Robotic
Manipulations with Large Language Models
Liangliang Chen, Yutian Lei, Shiyu Jin, Ying Zhang, Liangjun Zhang
Under review, 2024
Paper
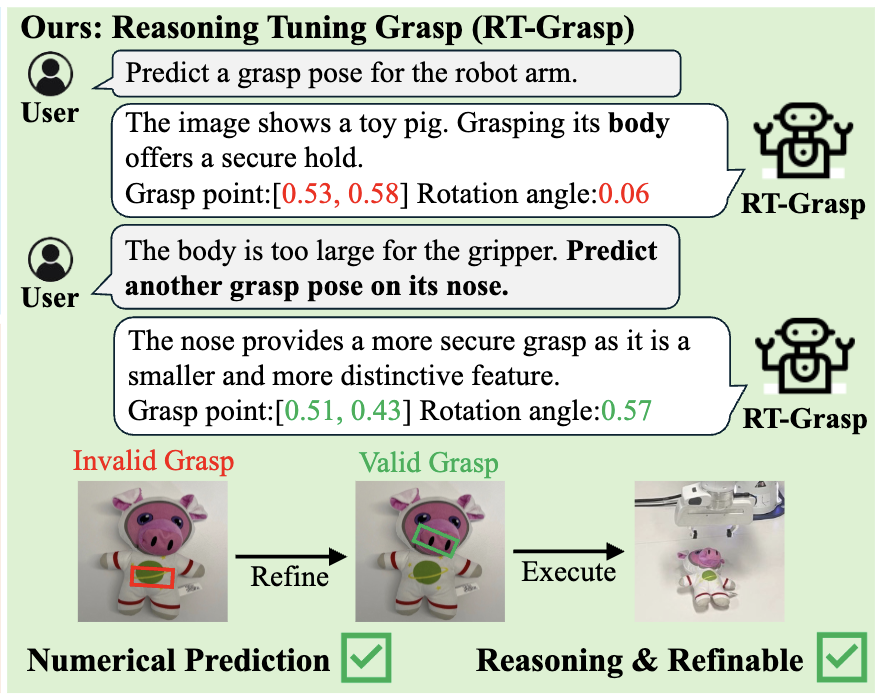 RT-Grasp: Reasoning Tuning Robotic Grasping
via Multi-modal Large Language Model
RT-Grasp: Reasoning Tuning Robotic Grasping
via Multi-modal Large Language Model
Jinxuan Xu, Shiyu Jin, Yutian Lei, Yuqian Zhang, Liangjun Zhang
Workshop in CoRL 2023
Paper
 Transformer-Based 3D Object Manipulation using Virtual In-Hand Views
Transformer-Based 3D Object Manipulation using Virtual In-Hand Views
Weiyao Wang, Yutian Lei, Shiyu Jin, Gregory D. Hager, Liangjun Zhang
Workshop in CoRL 2023
Paper
•
Code
Construction Robotics
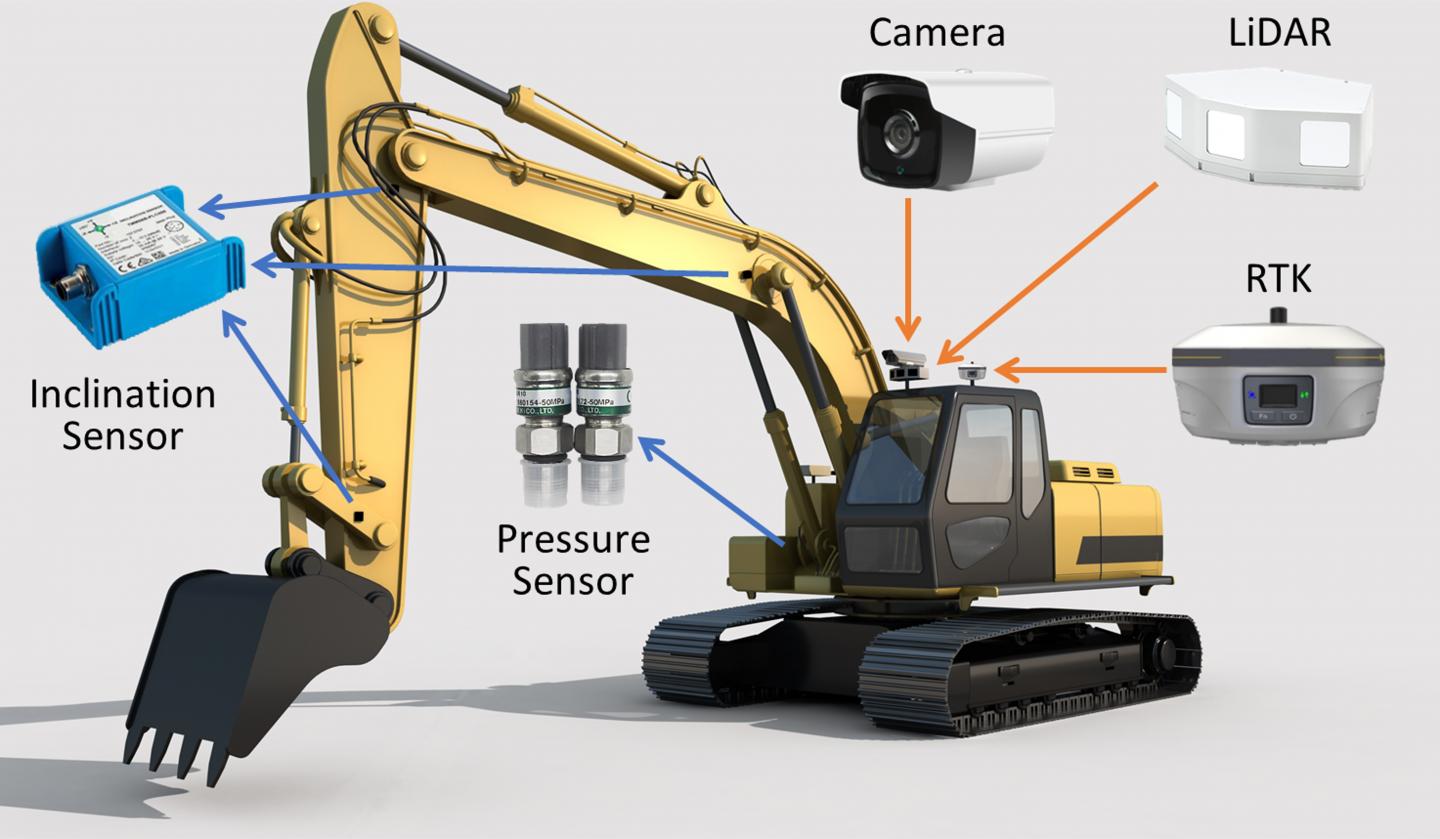
 Autonomous Excavator System for Construction Earth Moving
Autonomous Excavator System for Construction Earth Moving
Shiyu Jin, Liuwang Kang, Yuan-Chih Peng, Zhenpeng He, Ruitao Song,
Lingfeng Qian, Liangjun Zhang
Workshop in ICRA 2023, Workshop in RSS 2023
Paper
•
Video
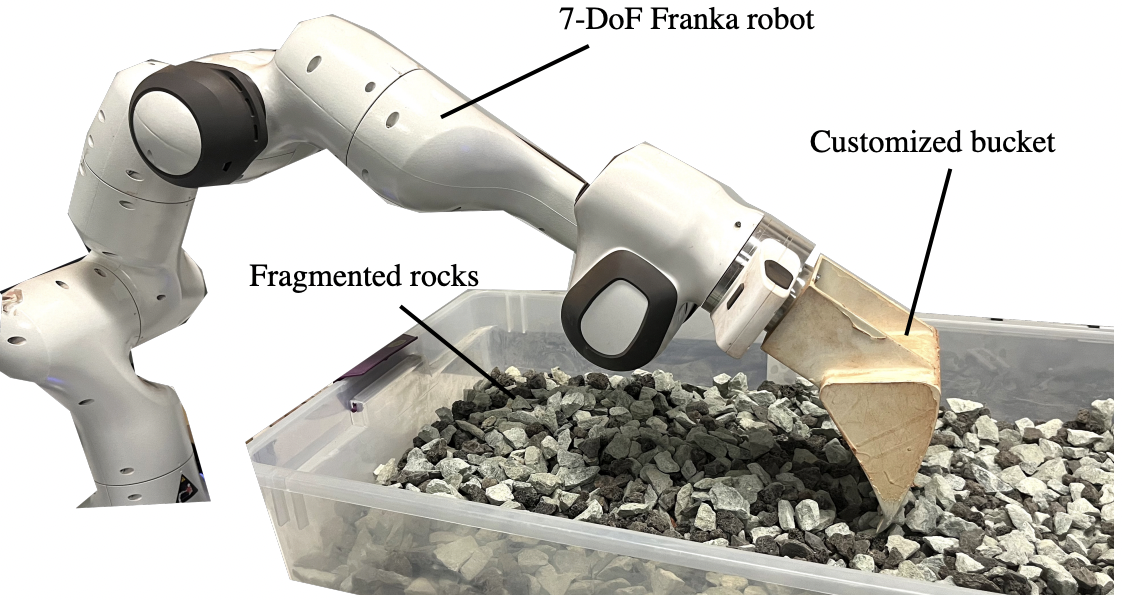 Robotic Excavation of Rigid Objects using Offline Reinforcement Learning
Robotic Excavation of Rigid Objects using Offline Reinforcement Learning
Shiyu Jin, Zhixian Ye, Liangjun Zhang
Techincal Report, 2023
Paper
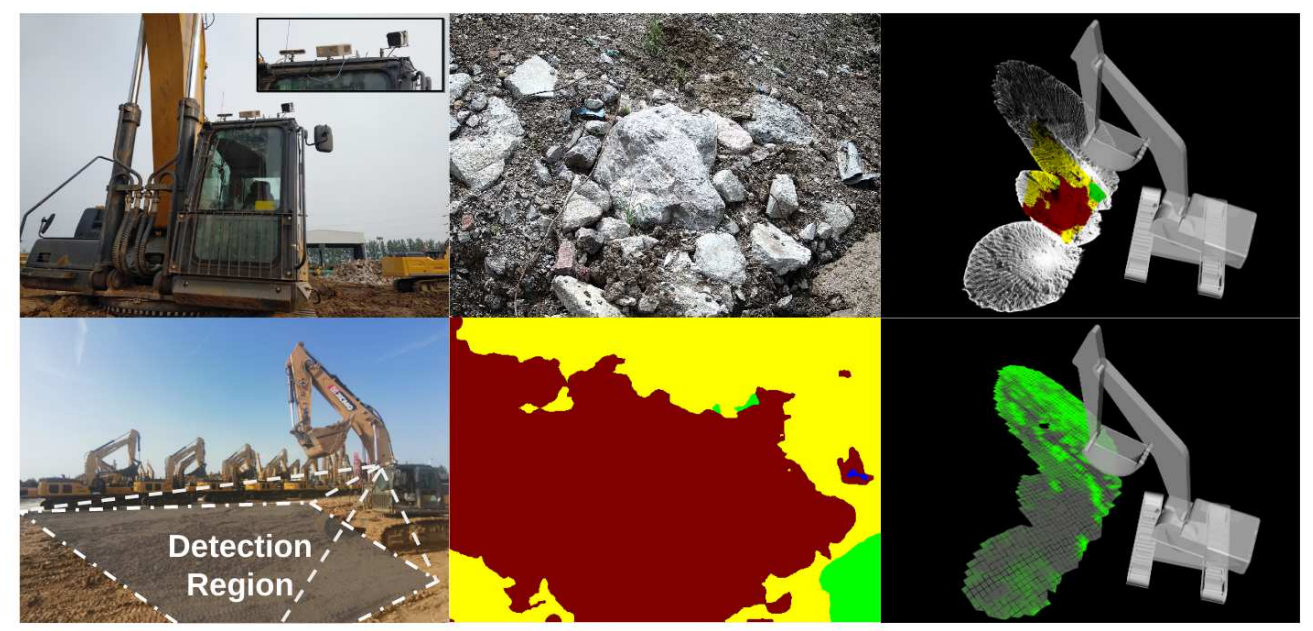 TNS: Terrain Traversability Mapping and Navigation System for Autonomous Excavators
•
Video
TNS: Terrain Traversability Mapping and Navigation System for Autonomous Excavators
•
Video
Tianrui Guan, Zhenpeng He, Ruitao Song, Dinesh Manocha, Liangjun Zhang
Robotics: Science and Systems (RSS) 2022
Extended work also appeared in Autonomous Robots
Paper
•
Project Webpage
An Autonomous Excavator System for Material Loading Tasks
Liangjun Zhang, Jinxin Zhao, Pinxin Long, Liyang Wang, Lingfeng Qian, Feixian Lu, Xibin Song, Dinesh Manocha
Science Robotics, Vol. 6, Issue 55, 2021
News Release
•
Video
•
Paper
Autonomous Driving: Perception, Behavior and Simulation
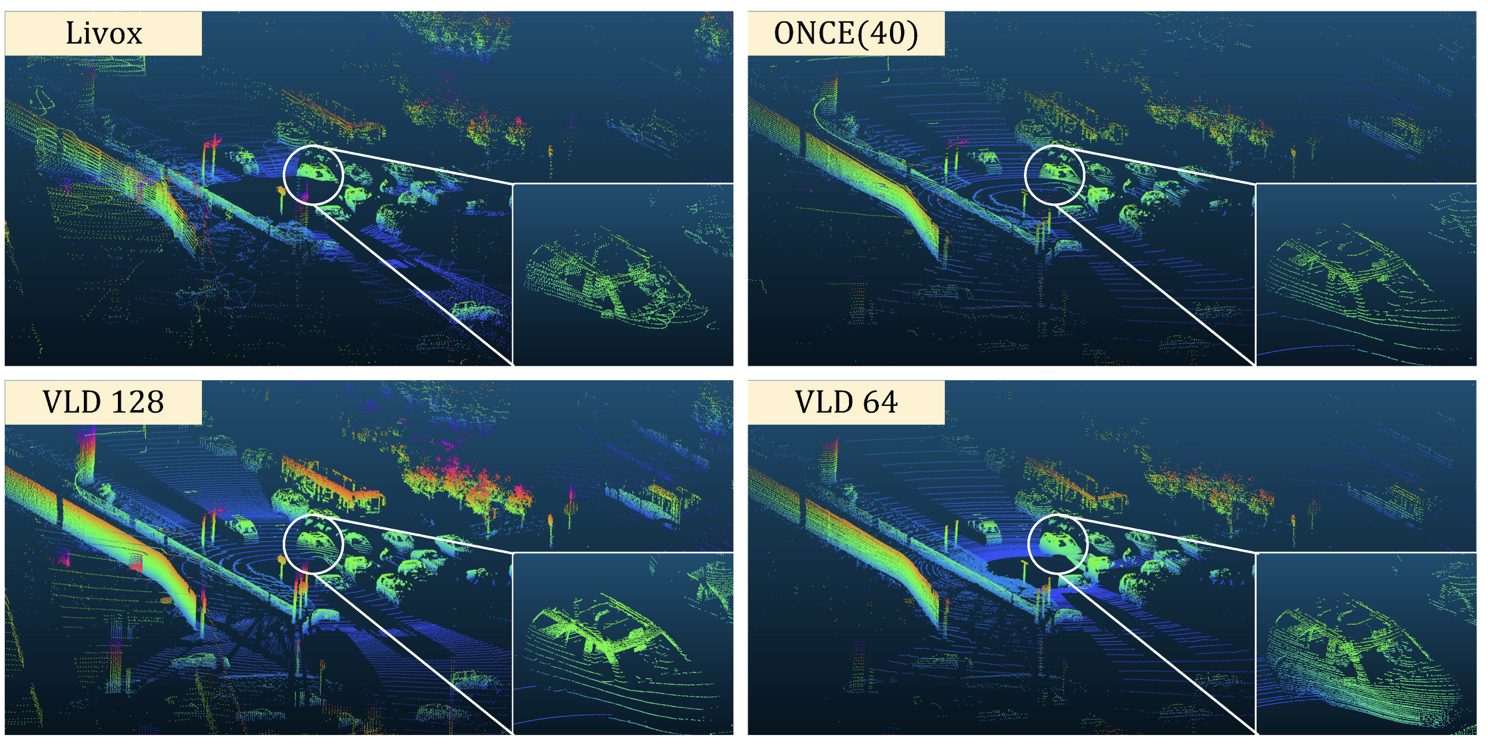
LiDAR-CS Dataset: LiDAR Point Cloud Dataset with Cross-Sensors for 3D Object
Detection
Jin Fang, Dingfu Zhou, Jingjing Zhao, Chenming Wu, Chulin Tang, Cheng-Zhong Xu, Liangjun Zhang
IEEE International Conference on Robotics and Automation (ICRA), 2024
Paper
 HMSim: A Hierarchical Multi-Agent Learning-Based Simulator For Autonomous Vehicles
HMSim: A Hierarchical Multi-Agent Learning-Based Simulator For Autonomous Vehicles
Haolan Liu, Jishen Zhao, Liangjun Zhang
Arxiv Preprint, 2024
Paper
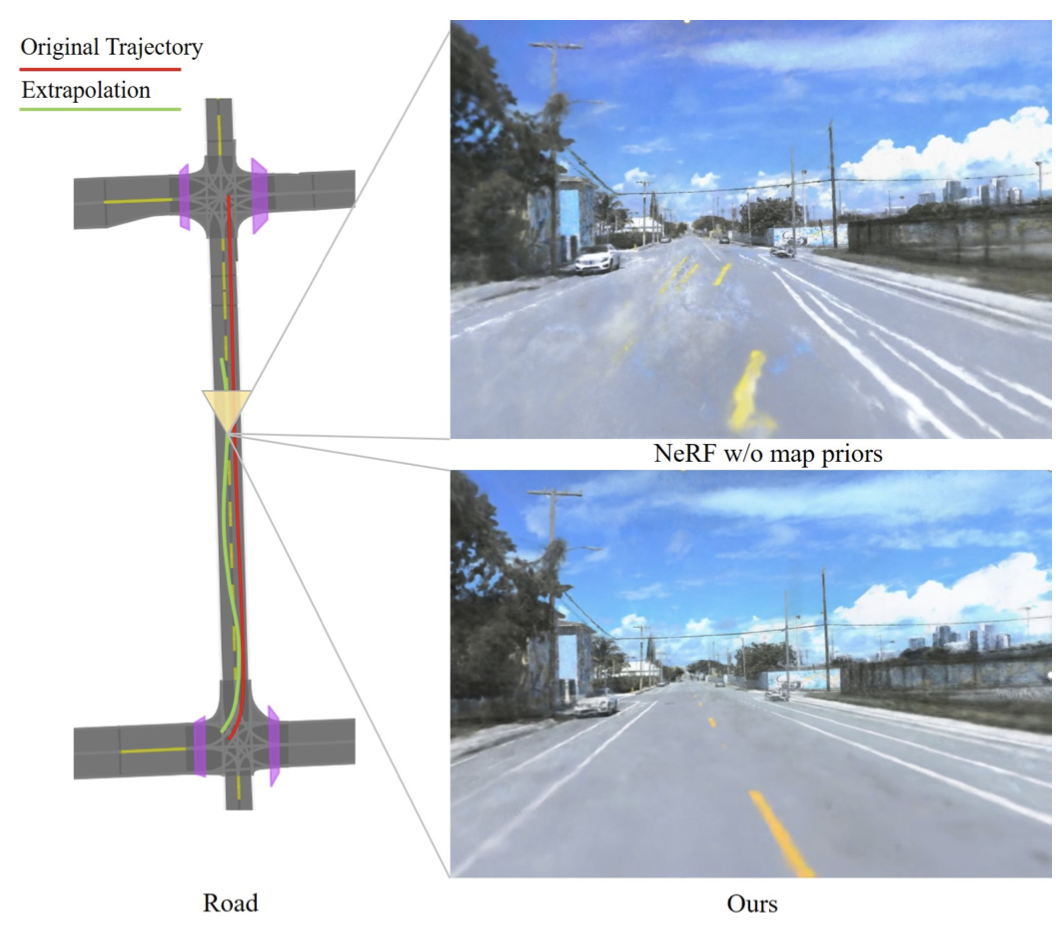
MapNeRF: Incorporating Map Priors into Neural Radiance Fields for Driving View Simulation
Chenming Wu, Jiadai Sun, Zhelun Shen, and Liangjun Zhang
IEEE International Conference on Intelligent Robots and Systems (IROS), 2023
Paper
•
video
 DGNR: Density-Guided Neural Point Rendering of Large Driving Scenes
DGNR: Density-Guided Neural Point Rendering of Large Driving Scenes
Zhuopeng Li, Chenming Wu, Liangjun Zhang, Jianke Zhu
Arxiv Preprint, 2023
Paper
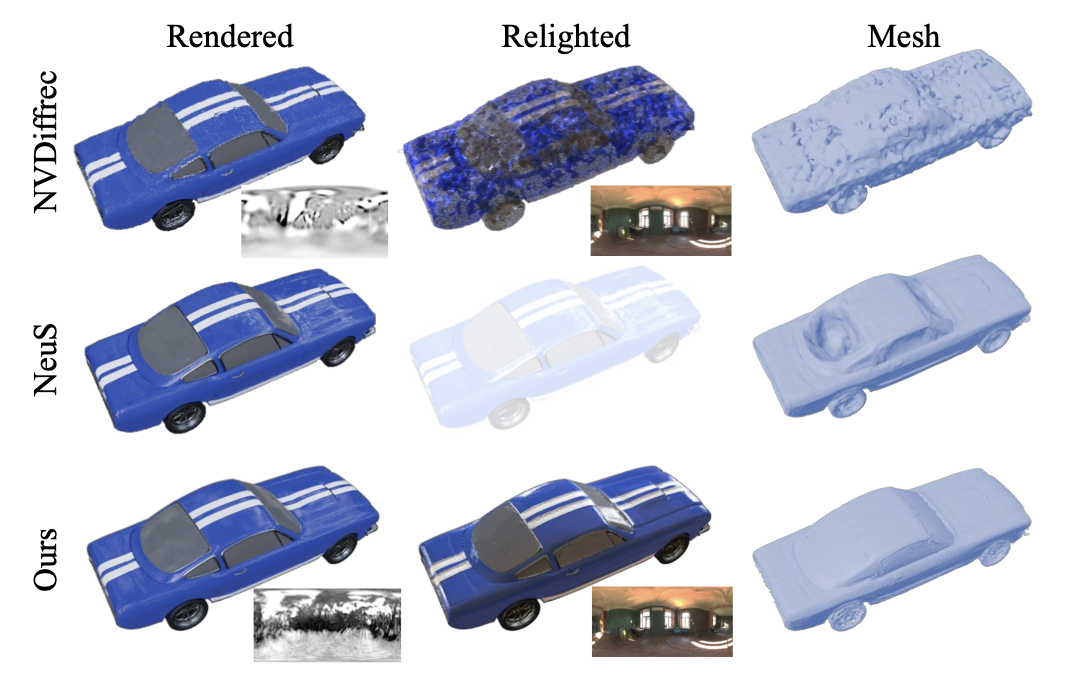 NeuS-PIR: Learning Relightable Neural Surface using Pre-Integrated Rendering
NeuS-PIR: Learning Relightable Neural Surface using Pre-Integrated Rendering
Shi Mao, Chenming Wu, Zhelun Shen, Yifan Wang, Dayan Wu, Liangjun Zhang
Arxiv Preprint, 2023
Paper
•
code
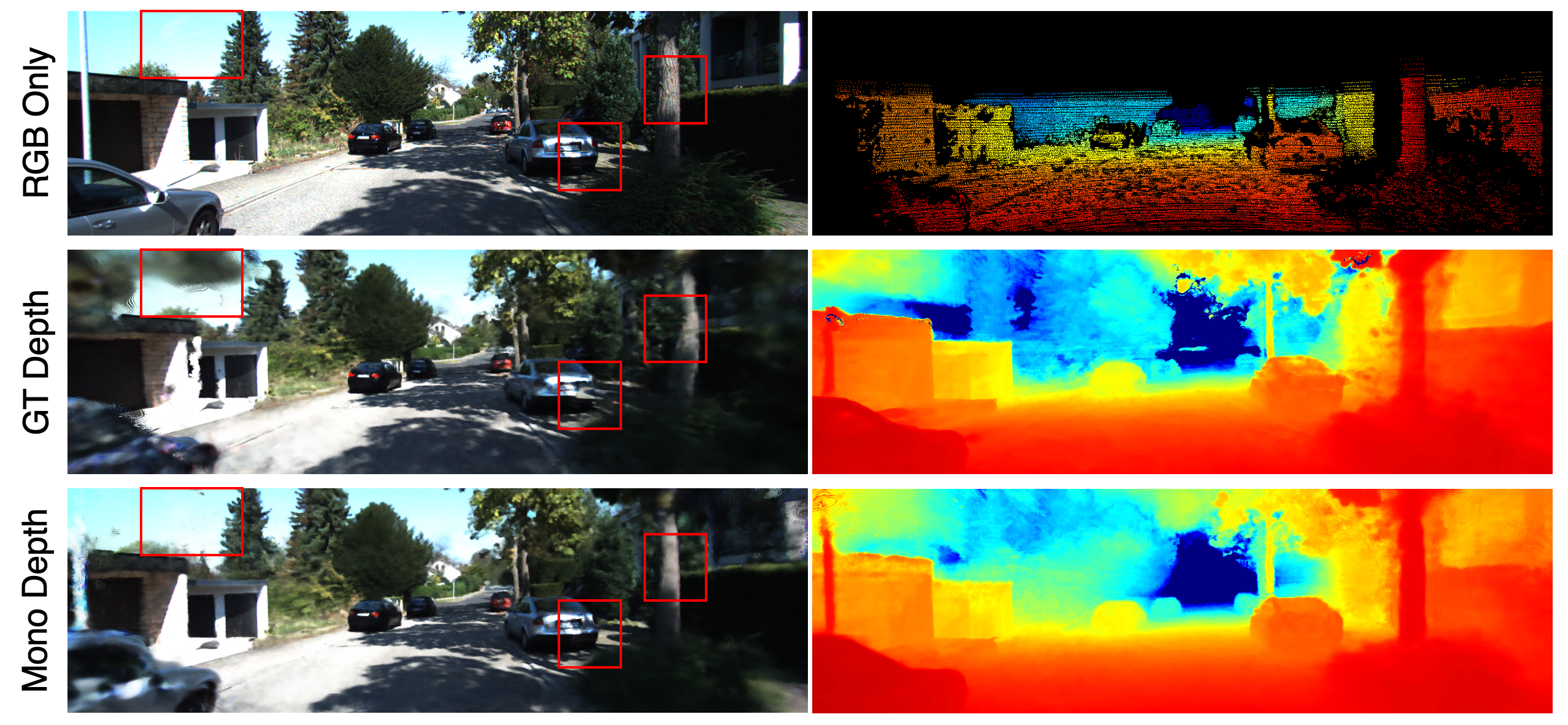 Digging into Depth Priors for Outdoor Neural Radiance Fields
Digging into Depth Priors for Outdoor Neural Radiance Fields
Chen Wang, Jiadai Sun, Lina Liu, Chenming Wu, Zhelun Shen, Dayan Wu, Yuchao Dai, Liangjun Zhang
ACM International Conference on Multimedia (MM, Oral), 2023
Paper
Motion Planning and Geometric Computing
 Selective retraction-based RRT planner for various environments
Selective retraction-based RRT planner for various environments
Junghwan Lee, Osung Kwon, Liangjun Zhang, Sung-eui Yoon
IEEE Transactions on Robotics (T-RO), 2014
Paper
 Sampling-based Exploration of Folded State of a Protein Under Kinematic and Geometric Constraints
Sampling-based Exploration of Folded State of a Protein Under Kinematic and Geometric Constraints
Peggy Yao, Liangjun Zhang, Jean-Claude Latombe
Proteins: Structure, Function, and Bioinformatics
Paper
 Collision-Free and Curvature-Continuous Path Smoothing In Cluttered Environments
Collision-Free and Curvature-Continuous Path Smoothing In Cluttered Environments
Jia Pan, Liangjun Zhang, Dinesh Manocha
Robotics: Science and Systems, 2011
PDF
•
Project Webpage
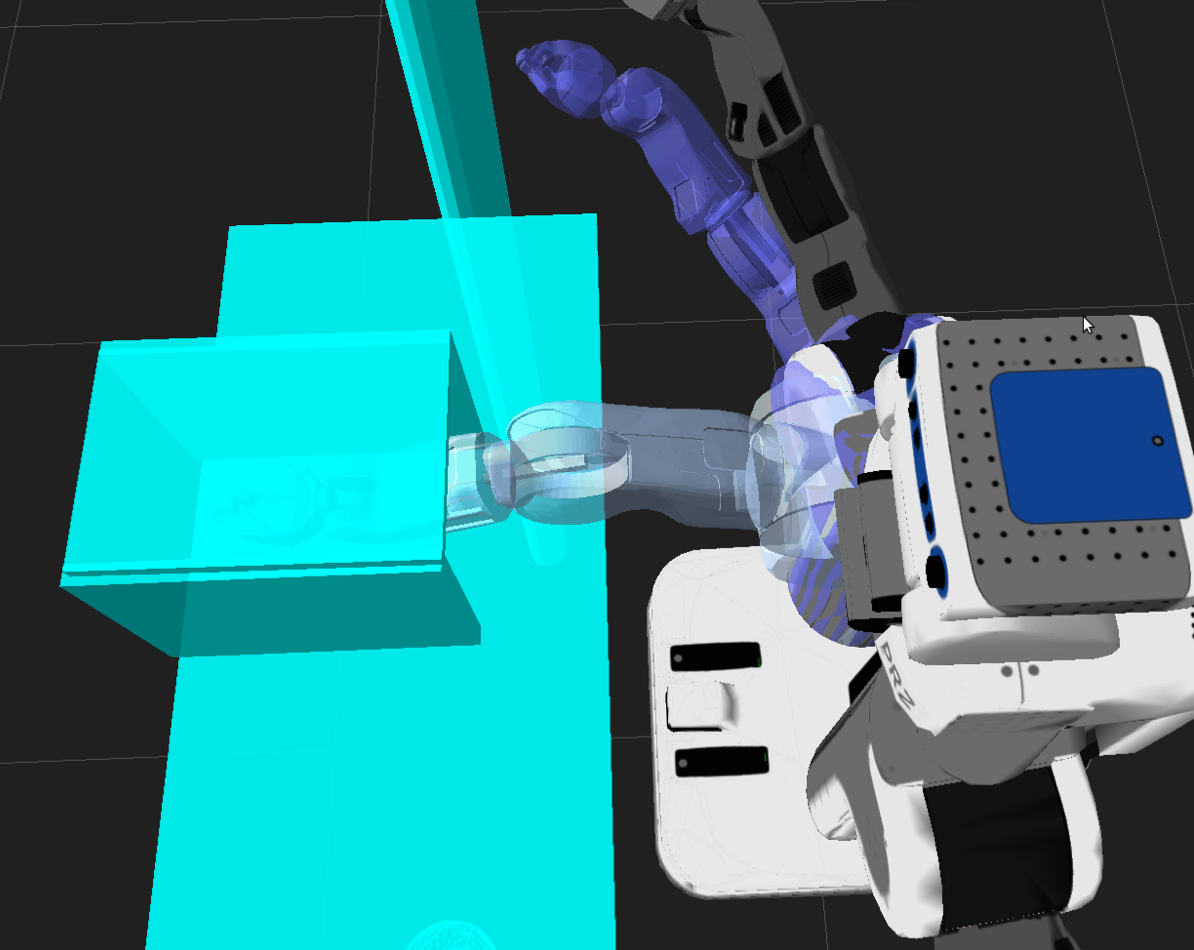
 A Hybrid Approach for Synthesizing Human Motion in Constrained Environments
A Hybrid Approach for Synthesizing Human Motion in Constrained Environments
Jia Pan, Liangjun Zhang, Ming Lin, Dinesh Manocha
The 23rd International Conference on Computer Animation and Social Agents, 2010
Video
•
Paper
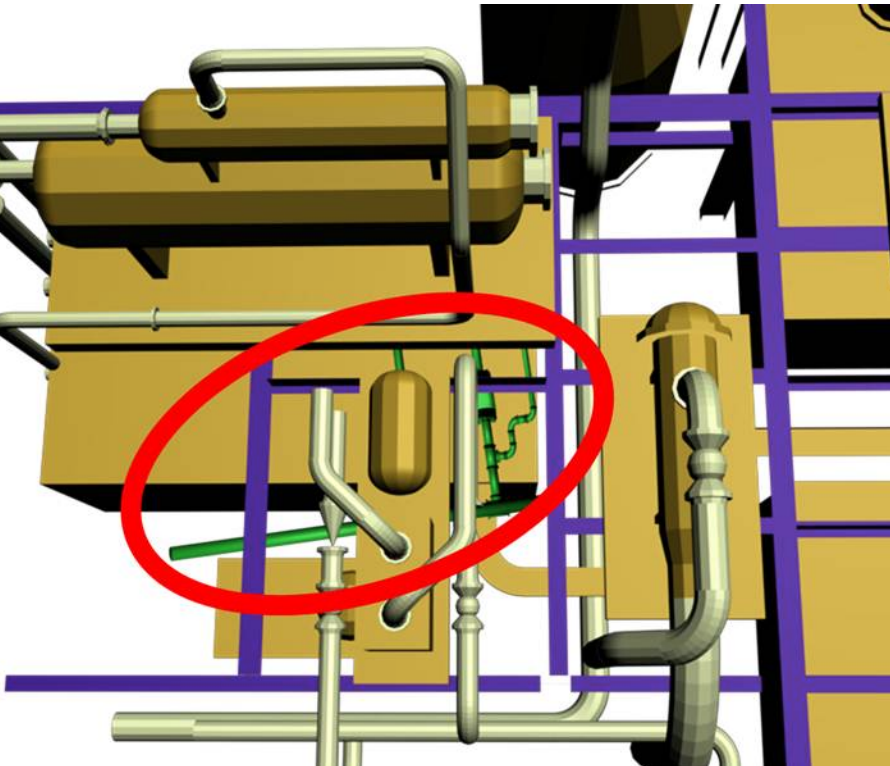
 D-Plan: Efficient Collision-Free Path Computation For Part Removal and Disassembly
D-Plan: Efficient Collision-Free Path Computation For Part Removal and Disassembly
Liangjun Zhang, Xin Huang, Young J. Kim, Dinesh Manocha
International CAD Conference (CAD'08), 2008, Best Paper Award
Journal of Computer-Aided Design and Applications, Volume 5, Issue 6, 2008
Paper
•
Project Webpage
 An Efficient Retraction-based RRT Planner
An Efficient Retraction-based RRT Planner
Liangjun Zhang, Dinesh Manocha
IEEE International Conference on Robotics and Automation (ICRA), 2008
Paper
•
Project Webpage